Problem with current time
回答済み
Hey,
Currently i try to Model a Orienteering Problem with time windows in a combination with a Pickup and Delivery Problem. Instead of gaining Score by visiting vertices, the score is gained by pickups and deliveries of vehicles in the path.
Orienteering Problem with time windows:
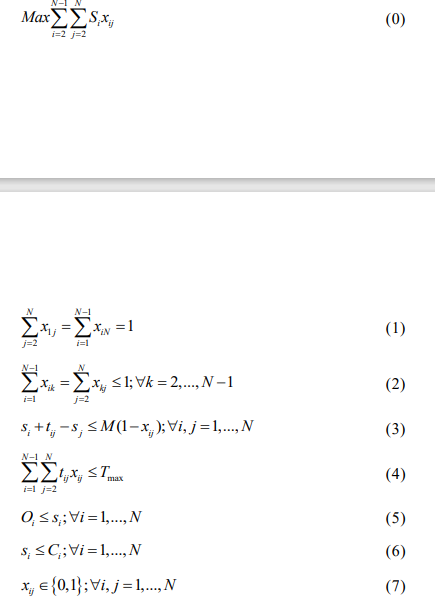
Pick -Up and Delivery:
https://link.springer.com/article/10.1007/s00291-016-0454-y#Sec2
So far the Orienteering Problem Works good, same as PuD. The Problem i have is with my "timenow". It declares the time at the current vertex i. I have no idea, how i can declare it in a nother way. Here i just made it as a grb.var with an index in range n.
my Code:
import random
import gurobipy as grb
import math
rnd = random
n = 15#Vertices
Distance = 25#Max Distance
npv = 4 #number of pickup vertices and number of delivery vertices
P= [rnd.randint(1,n-1) for i in range(npv)] #set of pickup vertices
D = [rnd.randint(1,n-1) for i in range(npv)]#set of delivery vertices
for i in range (npv): #start != ende
if (D[i] == P[i]):
D[i] -= 1
# recv= []
# for i in range(len(P)):
# recv.append(rnd.randint(10,20))
recv={i: rnd.randint(8,11) for i in D}
def distance(points, i, j):
dx = points[i][0] - points[j][0]
dy = points[i][1] - points[j][1]
return math.sqrt(dx*dx + dy*dy)
random.seed(1)
points = []
for i in range(n):
points.append((random.randint(0,25),random.randint(0,25)))
opt_model = grb.Model(name="Platooning Model")
times={i: rnd.randint(8,11) for i in range(n)}
timee={i: rnd.randint(14,21) for i in range(n)}
timestart = 8
M = 1000000000
# <= Variables
x_vars = {}
for i in range(n):
for j in range(n):
x_vars[i,j] = opt_model.addVar(vtype=grb.GRB.BINARY,name='e'+str(i)+'_'+str(j))
u={}
for i in range(1,n):
u[i]=opt_model.addVar(vtype=grb.GRB.CONTINUOUS,
name='e'+str(i))
timenow = opt_model.addVars(n,vtype = grb.GRB.CONTINUOUS,name='s'+str(i) )
opt_model.addConstr(timenow[0] == timestart)
# print(P,D)
print(recv)
# print(times)
# print(timee)
# print(timenow)
# <= Constraint (Mandatory Edges and excluding vertexes) Eq(1) hier 1,n zu n
opt_model.addConstr((grb.quicksum(x_vars[0,j] for j in range(n))) == 1)
opt_model.addConstr((grb.quicksum(x_vars[i,0] for i in range(n))) == 1)
opt_model.addConstr((grb.quicksum(x_vars[i,i] for i in range(1,n))) == 0)
# <= Constraint (Distance) Eq(3) Hier statt n-1 -> n
for i in range(n):
opt_model.addConstr(grb.quicksum(x_vars[i,j]*distance(points, i, j) for j in range(1,n) ) <= Distance)
# <= Constraint (Equality & Single edge in and out) Eq(2)
for k in range(1, n):
opt_model.addConstr(grb.quicksum(x_vars[i,k] for i in range(n))== grb.quicksum(x_vars[k,j] for j in range(n)))
opt_model.addConstr(grb.quicksum(x_vars[i,k] for i in range(n))<=1)
opt_model.addConstr(grb.quicksum(x_vars[k,j] for j in range(n))<=1)
#<= Constraint (Subtour elimination) Eq(4) Eq(5)
for i in range(1,n):
opt_model.addConstr(2 <= u[i])
opt_model.addConstr(u[i] <= n)
for i in range(1,n):
for j in range(1,n):
opt_model.addConstr((u[i] - u[j] +1 <= (n-1)*(1-x_vars[i,j])))
#objective = grb.quicksum(recv[i]*x_vars[P[i],j] for i in range(len(P)) for j in range(n))
#Objective nach Delivery
objective = grb.quicksum(recv[j]*x_vars[i,j] for i in range(n) for j in D)
for i in range(len(P)):
opt_model.addConstr(( grb.quicksum(x_vars[P[i],j] for j in range(n)) - grb.quicksum(x_vars[D[i], j] for j in range(n))==0))
for i in range(n):
opt_model.addConstr(times[i] <= timenow[i])
opt_model.addConstr(timenow[i]<=timee[i])
opt_model.addConstrs( timenow[P[i]] <= timenow[D[i]] for i in range(len(P)))
#13 Pud
opt_model.addConstrs( timenow[j] >= x_vars[i,j] * ( timenow[i] + distance(points, i, j)) for j in range (1,n) for i in range (1,n))
#BIG M
#opt_model.addConstrs(timenow[i] + distance(points, i, j) - timenow[j]<= M * (1-x_vars[i,j]) for j in range (1,n) for i in range (1,n))
opt_model.ModelSense = grb.GRB.MAXIMIZE
opt_model.setObjective(objective)
# opt_model.update()
# opt_model.Params.MIPGap = 0.15 #stop 15% gap
# opt_model.Params.TimeLimit = 60 #seconds timelimit
opt_model.optimize()
import matplotlib.pyplot as plt
select = grb.tuplelist((i,j) for i,j in x_vars.keys() if x_vars[i,j].X > 0.5)
x_val = [x[0] for x in points]
y_val = [x[1] for x in points]
for i,j in select:
plt.annotate('$Standort_%d$'%(i),(x_val[i]+2,y_val[i],))#0-9
plt.scatter(x_val[1:],y_val[1:], c='b') #locations for 1 till n+1 customer/clients
for i,j in select:
plt.plot([x_val[i],x_val[j]],[y_val[i],y_val[j]], c = 'g', zorder=0,alpha=0.3)
plt.plot(x_val[0], y_val[0], c = 'r', marker='s')
platoonsize = 0
for i,j in select:
for p in P:
if p == i:
platoonsize = platoonsize + 1
for d in D:
if d == j:
if j>i:
platoonsize = platoonsize - 1
print("Maximale Platoongröße = ",platoonsize)
plt.show()
print(select)
print(recv)
print(P,D)
-
正式なコメント

-
Gurobi Staff
This post is more than three years old. Some information may not be up to date. For current information, please check the Gurobi Documentation or Knowledge Base. If you need more help, please create a new post in the community forum. Or why not try our AI Gurobot?. -
-

-
Hi Bardja,
Your question is one of the "open for suggestions" type so I will just give it a try.
I assume you want to track the time spend for a specific delivery route, is this correct? You then could introduce time costs for each edge instead of each vertex to track the time spent by a specific route up to a given vertex. The time cost computation could be integrated into the distance function you already defined.
In order to compute the time spent up to a given vertex, you would just have to sum up over the edges of the sub-route up to the particular vertex of interest.
I hope this helps.
Best regards,
Jaromił0 -
投稿コメントは受け付けていません。
コメント
2件のコメント